ステレオ画像から距離計測¶
目的¶
- このチュートリアルでは
- ステレオ画像から距離マップを計算する方法を学ぶ.
基礎¶
前のチュートリアルでエピポーラ幾何の概念を学んだ.同一シーンを撮影した2枚の画像があれば,そのシーンの距離情報を取得できることは直観的に分かる.下に,この直観を証明する画像と数式を示す.(画像転載 : Bradski, G. & Kaehler, A. (2008). Learning OpenCV. O'Reilly )
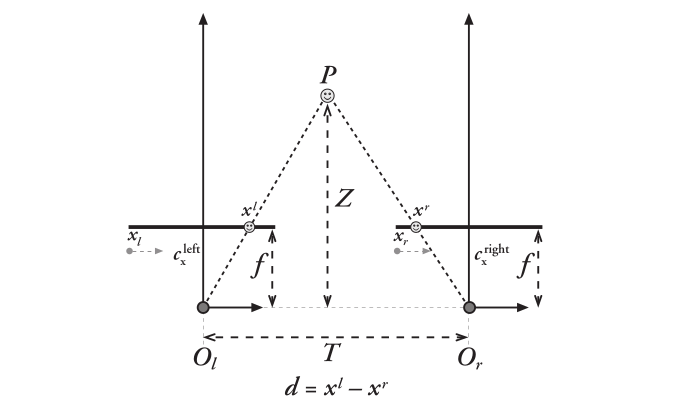
上記の図には相似な三角形を含んでいる(⊿POl Orと⊿Pxlxr).この相似関係から、次の式が求められる:
ここでxlは左のカメラの画像における点Pの投影点の座標(2つの直線の交点が原点)であり、xrは右のカメラの画像における点Pの投影点の座標(それぞれ2つの直線の交点が原点)である(上の図ではxl は正、xr は負の値を持つ。故にd=xl- xr(=d, 視差)は正の値で、点xlと点xr間の距離とTとの差を表す)。Tは2台のカメラの投影中心間の距離(既知とする)、  はカメラの焦点距離(これも既知とする)である.簡潔に言えば,上の式が意味するところは、画像における対応点の距離が、カメラの投影中心と3次元の点との間の距離に「反比例」するということである.この情報を使って,画像におけるすべての点の距離を求めることができる.
はカメラの焦点距離(これも既知とする)である.簡潔に言えば,上の式が意味するところは、画像における対応点の距離が、カメラの投影中心と3次元の点との間の距離に「反比例」するということである.この情報を使って,画像におけるすべての点の距離を求めることができる.
まず2枚の画像の間の対応点を見つける.エピポーラ拘束についてはすでに学んでおり、この処理を速くかつ正確にできることは了解済みである。さて対応点を見つけてしまえば,視差(disparity)が計算できる.OpenCVを使ってどのように視差を計算するか見ていこう.
実装(コード)¶
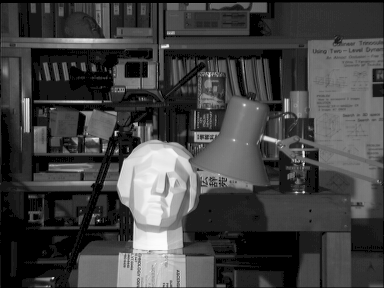
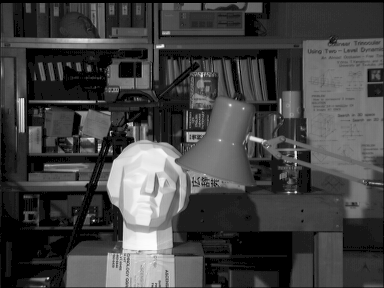
次が視差マップ(disparity map)を計算するためのコードであり、 cv2.StereoBM_create()関数を用いている。 (コード, 左画像, 右画像)
import numpy as np
import cv2
from matplotlib import pyplot as plt
imgL = cv2.imread('tsukuba_l.png',0)
imgR = cv2.imread('tsukuba_r.png',0)
stereo = cv2.StereoBM_create(numDisparities=16, blockSize=15)
disparity = stereo.compute(imgL,imgR)
plt.imshow(disparity,'gray')
plt.show()
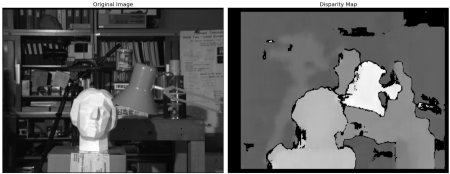
以下の画像に原画像の片方と対応する視差マップを示す.見て分かるように大きなノイズを含んでいる. `` numDisparities`` と blockSize の値を調整すると,より良い結果が得られるはずである.
{kind=link}
{kind=link}
Note
詳しい情報を載せる予定(翻訳時点(2017/01/26)では記載されていない.)
補足資料¶
課題¶
- OpenCVのサンプルの中に視差マップと3次元復元を行うサンプルが含まれている.
stereo_match.pyを試しに動かしてみてみよう.