Learning Open3D→Tutorial→基礎編→Jupyter視覚化
Jupyter視覚化
バージョン0.4.0以降、WebGLでJupyter視覚化の実験的サポートが追加された。 Open3Dがpipまたはcondaリポジトリからインストールされた場合、サポートされているJupyterはデフォルトで有効になっている。 Open3Dがソースからコンパイルされている場合は、Jupyter視覚化サポートを使用してOpen3Dを構築する方法について、Setup Python binding environmentsを参照されたい。
Jupyter Visualizationはまだ初期の実験段階であることに注意しよう。 主な制限事項は次のとおりである。
1. 点群ジオメトリのみがサポートされている
2. カメラは固定パラメータで初期化されるため、初期ビューは点群に最適ではない場合がある
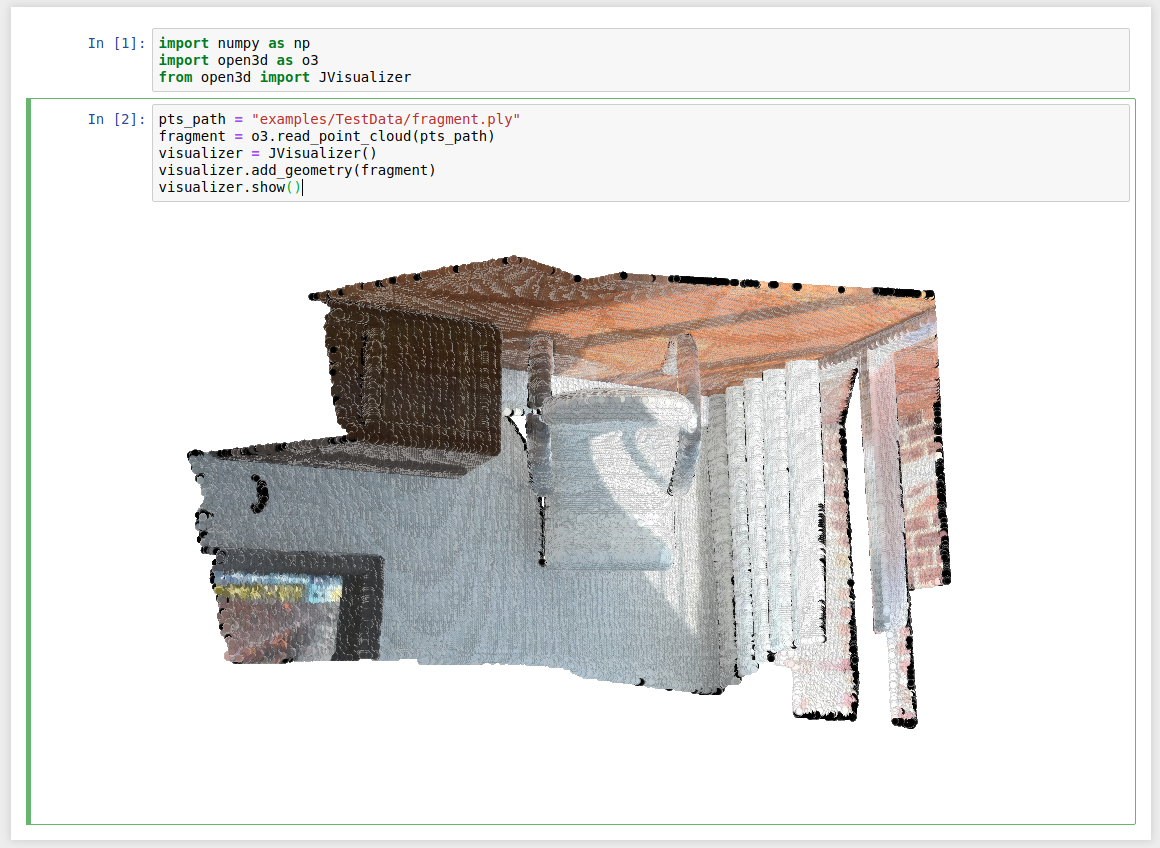
3. パフォーマンスは最適化されていないJupyter視覚化はJVisualizerクラスで定義されている。まずクラスを初期化し、add_geometryを呼び出してOpen3Dジオメトリを追加し、次にshowを呼び出してJupyterウィジェットを表示する。
注意: コードを走らせる環境に注意すること。TestDataディレクトリがカレント(作業)ディレクトリからみて、祖先ディレクトリの下にあることを確認しよう
import numpy as np
import open3d as o3d
from open3d import JVisualizer
pts_path = "../../TestData/fragment.ply"
fragment = o3d.io.read_point_cloud(pts_path)
visualizer = JVisualizer()
visualizer.add_geometry(fragment)
visualizer.show()
ポイントクラウドが見えない場合(カメラのパラメタの初期値のせいで)は、まずマウスホイールでズームイン・ズームアウトを試し、次に、マウスの右ボタンをドラッグしてパンしてみよ。
白井の環境では見ることができなかったので、ホームからこうなるはずというリンクを紹介しておく
Azure Kinect with Open3D はここでは扱わない
{kind=link}